 在线客服
在线客服 微信客服
微信客服
















 [VIP第6年] 指数:4
[VIP第6年] 指数:4





咨询电话
021-80392549


|
店铺基本资料信息
|
|||||||||||||||||||||||
产品优势:
1.承载能力高 谐波传动中,齿与齿的啮合是面接触,加上同时啮合齿数(重叠系数)比较多,因而单位面积载荷小,承载能力较其他传动形式高。
2.传动比大 单级谐波齿轮传动的传动比,可达 i=70~500。
3.体积小、重量轻。
4.传动效率高、寿命长。
5.传动平稳、无冲击,无噪音,运动精度高。
6.由于柔轮承受较大的交变载荷,因而对柔轮材料的抗疲劳强度、加工和热处理要求较高,工艺复杂。
谐波减速器在国内于六七十年代才开始研制,到目前已有不少厂家专门生产,并形成系列化。广泛应用于电子、航天航空、机器人等行业,由于它的独特优点,在化工行业的应用也逐渐增多。
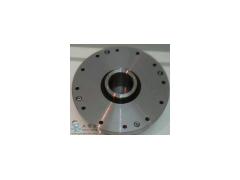
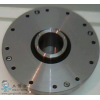
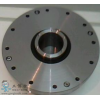
产品详情:
它主要由三个基本构件组成:
(1)带有内齿圈的刚性齿轮(刚轮),它相当于行星系中的中心轮;
(2)带有外齿圈的柔性齿轮(柔轮),它相当于行星齿轮;
(3)波发生器H,它相当于行星架。
作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。
波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮的内壁相互压紧。柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。波发生器是使柔轮产生可控弹性变形的构件。当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。周长上其他区段的齿处于啮合和脱离的过渡状态。当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器H相反方向的缓慢旋转。
工作时,固定钢轮,由电机带动波发生器转动,柔轮作为从动轮,输出转动,带动负载运动。
在传动过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数,以 n 表示。常用的是双波和三波两种。双波传动的柔轮应力较小,结构比较简单,易于获得大的传动比。故为目前应用广的一种。
谐波齿轮传动的柔轮和刚轮的周节相同,但齿数不等,通常采用刚轮与柔轮齿数差等于波数,即
z2-z1=n
式中 z2、z1--分别为刚轮与柔轮的齿数。
当刚轮固定、发生器主动、柔轮从动时,谐波齿轮传动的传动比为
i=-z1/(z2-z1)
双波传动中,z2-z1=2,柔轮齿数很多。上式负号表示柔轮的转向与波发生器的转向相反。由此可看出,谐波减速器可获得很大的传动比。




