 在线客服
在线客服 微信客服
微信客服

















 [VIP第12年] 指数:7
[VIP第12年] 指数:7 通过认证
通过认证 







咨询电话
021-80392549


ArcWeld PowerPac(AWPP)是RobotStudio的一个插件,是一种独一无二的基于几何形状的离线编程工具,用于生成弧焊程序。程序员可在CAD几何模型上定义焊接位置,系统根据该模型自动生成机器人位置(包括接近位置和离开位置)。也就是说,为焊接机器人编程从未如此容易。
使用ArcWeld PowerPac软件既省时又省钱。使用 ArcWeld PowerPac,用户可以离线对机器人进行编程,而无需停止生产。并且,用户可以在早期阶段验证自己所设计的方案不会受到夹具的干扰,这就在生产启动期间降低了发生严重错误的风险。另外,在用户创建焊接时,其能够精确控制焊枪的角度,从而提高焊接质量。
详细介绍:
1. 创建焊接:要创建焊接,用户首先在图形上选择焊接的起点和终点。下一步是定义工艺参数,如焊矩角度-工作角度、推/拉和旋转角度等;焊接参数-焊缝、焊接和摆动参数;动作参数-速度、区域;动作类型- 线性、循环和接点动作;指令类型-移动、电弧、搜索。
2. 检查可达性:ArcWeld PowerPac 根据输入自动生成焊接路径, 并创建使机器人进出焊接地点的接近和离开位置。 半自动的优化工具沿着焊接路径定义手臂配置,并避 免接点限制和奇点错误。ArcWeld PowerPac 自动检查可达性,并且出现伸展能力问题时通知用户。
3. 冲突检测:内置冲突检测器会显示机器人和部件之间的任何冲突。这会在程序进入生产时阻止不必要突发事件的发生。甚至可能对节拍时间进行估计,这有助于用户对程序进行优化。在下载*终程序到实际机器人前, 用户可在 RobotStudio 中执行整个程序以对其进行调试。
4. MultiMove:使用 RobotStudio 5 ABB 将其“虚拟机器人技术”推 进到下一级。现在可以同时运行好几个虚拟机器人,并对从一个控制器运行几个机器人的新IRC5 技术MultiMove进行支持。RobotStudio5解决方案使 MultiMove 系统便于使用、便于计划并便于编程。通过 RobotStudio 5 ABB 是第一家也是唯一一家能为 MultiMove 系统提供脱机编程和模拟工具的供应商。
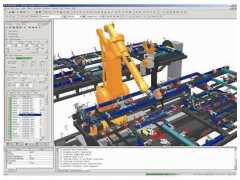
产品操作界面示例:

多机器人编程
了解更多请前往:ABB机器人




